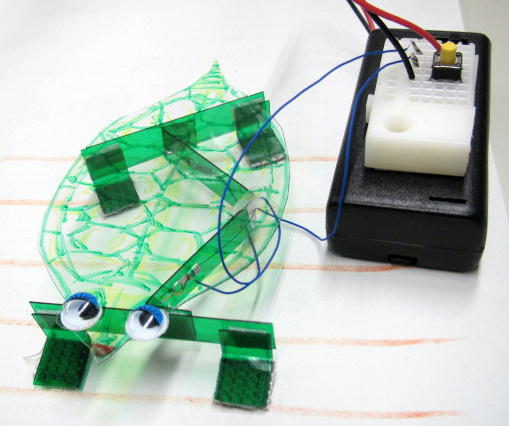
形状記憶合金「バイオメタル」の筋肉を持ち,洋服ブラシの靴をはいた,世界一単純な構造の四足歩行メカののロボットを作って歩かせます。ロボット部分の予算は200円以内です。
○こんなことが学べます
形状記憶合金は、電流を流すと発熱して縮み,電流を切ると伸びます。筋肉のようなはたらきをするので,人工筋肉「バイオメタル」と呼ばれます。
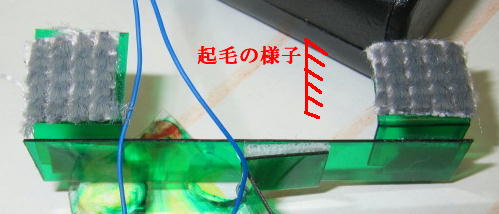
ロボットの移動には,脚の裏の洋服ブラシの毛並の向きによる摩擦の差を使っています。
動画が見られます
http://youtu.be/gV3-Co2VT8c
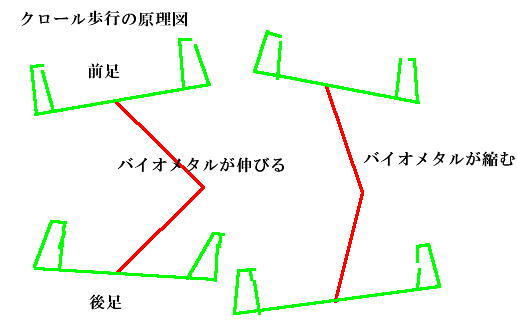
バイオメタルが縮むと折り曲げたプラスチックが伸び,前後の足の傾きが変わります。前足の右と後ろ足の左,前足の左と後ろ足の右が同時に前に出るため,四足歩行が実現します。足の裏には前方には滑り,後方には摩擦で止まるよう,洋服ブラシの布が貼ってあります。
人工筋肉(形状記憶合金 直径0.1mm×5cm),プラ板(ダイソーの赤と緑の二枚組下敷き),アルミテープ,洋服ブラシ,メガネ端子,配線材,両面テープ(5mm幅),ステプラー,圧着ペンチ
○入手先
人工筋肉バイオメタル,メガネ端子:トキコーポレーションhttp://www.toki.co.jp/biometal/
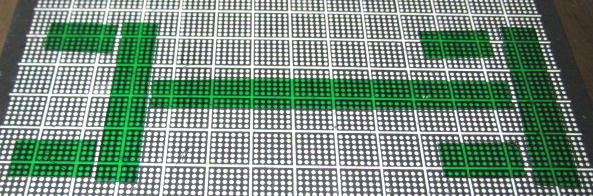
本体部分のプラスチック。足の部分は中央で90°に折り曲げる。接着は全て両面テープを用いる。

亀の甲羅と頭(動眼を付けると良い),しっぽ(揺れるようにするとかわいい)
(1) 1cm幅に切ったプラスチックの下敷きを,右図のように切ります。
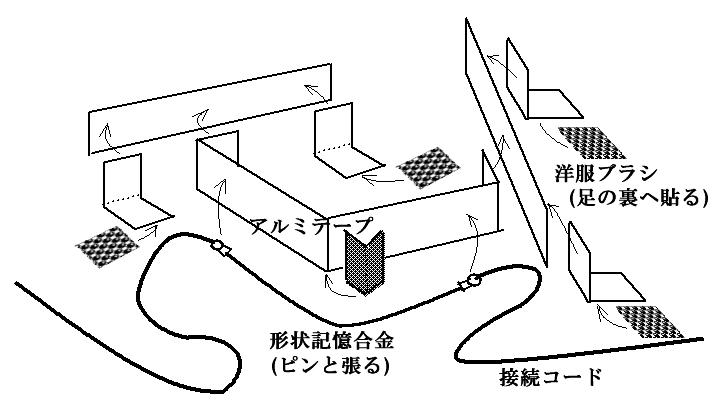
(2) 胴体の板は中央で約120°に曲げます。山折り部分にアルミテープ(熱による溶融防止)を貼り,形状記憶合金線(バイオメタル)の両端に付けたメガネ端子部分を,ピンと張って,胴体のプラスチックにステプラーで止めます。
(3) 各パーツのプラスチック板を。両面テープで貼り付けます。
(4) 4つの足の裏に,向きに注意して切った洋服ブラシを両面テープで止めます。洋服ブラシは,前には進みやすく,後には戻りにくいように貼ります。
形状記憶合金線に接続した配線コードの端を乾電池に接続し、紙の上に置いて電流を断続し、歩行動作を確認します。
※足の開閉が小さいときは、形状記憶合金を強く張り「なおしてください。
○気をつけよう
スイッチを入れると形状記憶合金が発熱します。2秒以上押し続けてはいけません。また、形状記憶合金は熱くなるので、さわらないように注意しましょう。
○開発にあたって
科学の祭典全国大会2014に向けて,X-Roboを発展させ,4本足で歩行できる簡単な構造のロボットを開発しました。

エンジン部分です。

TAMIYAのクロール走行のカメさんです。前足が左右に振れるようになっており,3つの足で支えて,1つの足が前に出る形で進みます。力も強く,豪快に素早く歩き(走り)ます。
動画がU-Tubeで見られます。http://youtu.be/KGLR5ZyfMaw