
婎斅偲揹抮傪攚晧偭偨帺憱幃偺儘儃僢僩偱偡
僶僀僆儊僞儖偺怢弅偲丆慜屻偺懌偺棤偺杸嶤偺嵎偱堏摦偡傞広庢拵儘儃僢僩傪嶌傝傑偡丅僶僀僆儊僞儖偼揹棳ON偱弅傒丆OFF偱怢傃傑偡偑丆僞僀儅乕IC555傪梡偄偨敪怳夞楬偺弌椡傪FET偺2SJ377偱斀揮偝偣丆ON偺帪娫傪OFF偺帪娫偺1/4偵偟偰摦偐偟偰偄傑偡丅
仜偙傫側偙偲偑妛傋傑偡丂
揹棳偺擬嶌梡傗丆擬偵傛偭偰廂弅偡傞僶僀僆儊僞儖偺惈幙丆僞僀儅乕IC傪梡偄偨敪怳夞楬偺巇慻傒丆FET偺摥偒傪妛傇偙偲偑偱偒傑偡丅傑偨丆嬝擏偺摦嶌偺偟偔傒傪妛傇偙偲偑偱偒傑偡丅
仜偙傫側巇慻傒偱偡
僶僀僆儊僞儖偼宍忬婰壇崌嬥偱偱偒偰偄傑偡丅廂弅偑巒傑傞傞壏搙偼60乣70亱C偱丆椻傗偣偽尦偺挿偝偵怢傃傑偡丅侾倣偵偮偒栺4cm怢傃傑偡丅偙偺偲偒揹棳偼100乣200mA棳偟傑偡丅
10cm偺挿偝偵愗傞偲丆1.5V偺姡揹抮俀杮暘偱偡丅僞僀儅乕IC555偼3僺儞偺弌椡偑H儗儀儖偵側偭偰偄傞帪娫傪TH丄L儗儀儖偵側偭偰偄傞帪娫傪TL偲偡傞偲丄TH丄TL偼師幃偱媮傔傜傟傑偡丅偙偙偱偼Ra亖R1丆Rb=R2+VR2(200k兌壜曄乯偲偟偰丆
TH亖0.693丒乮Ra亄Rb乯丒C
TL亖0.693丒Rb丒C
廃攇悢倖偼丄
倖亖1.44乛乮Ra亄2Rb乯丒C
偱偡丅偙傟偱偼ON偺帪娫偑OFF偺帪娫傛傝挿偔側傞偺偱丆FET偺2SJ宆偱斀揮偟傑偡丅
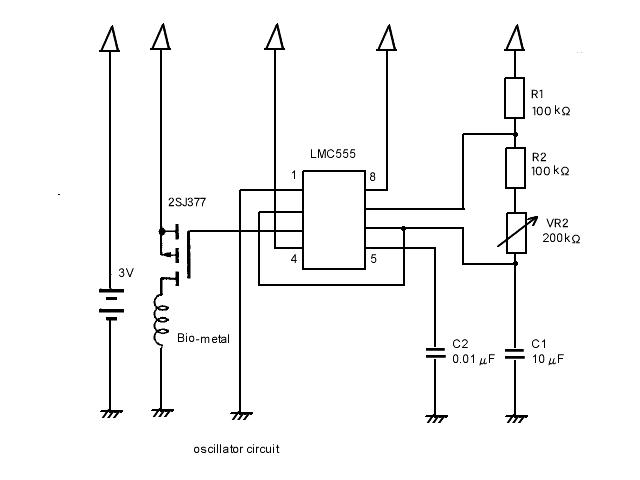
夞楬恾
婎斅偍傛傃夞楬晹昳乮夞楬恾嶲徠乯丆僶僀僆儊僞儖乮BMF150丂僩僉丒僐乕億儗乕僔儑儞乯10cm丆儊僈僱抂巕(彫乯俀屄丆扨俆揹抮儂儖僟乕俀屄丆扨俆揹抮俀杮丆攝慄嵽丆僾儔斅丆椉柺僥乕僾丆梞暈僽儔僔丆偼偝傒丆敿揷偛偰丆埑拝梡僾儔僀儎丆儂僢僠僉僗
仜擖庤愭
僶僀僆儊僞儖乮BMF150乯丆儊僈僱抂巕(彫乯丗丂僩僉丒僐乕億儗乕僔儑儞
仜嶌偭偰傒傛偆
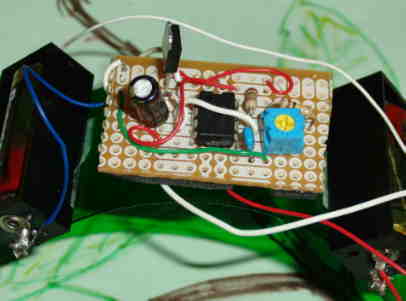
嘆婎斅傪攝慄偟傑偡丅
嘇僶僀僆儊僞儖偺抂偲丆攝慄嵽偺抂傪儊僈僱抂巕偱愙懕偟丆偟偭偐傝埑拝偟傑偡丅
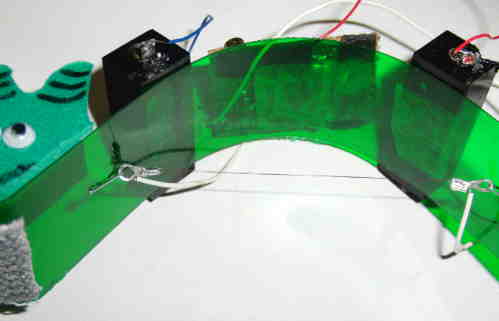
嘊摟柧僾儔僗僠僢僋斅傪挿曽宍偵愗傝丆拞墰偲椉抂傪嬋偘偰広庢拵偺杮懱偲偟傑偡丅懌偺棤偺晹暘偵梞暈僽儔僔偺晍傪揬傝偮偗傑偡丅
嘋僶僀僆儊僞儖傪杮懱偵儂僢僠僉僗偱屌掕偟傑偡丅
嘍婎斅偲姡揹抮儃僢僋僗傪攝慄偟丆杮懱偵椉柺僥乕僾偱巭傔傑偡丅
嘆僶僀僆儊僞儖偼捠揹拞偼擬偔側傞偺偱丆踢讛聜獥n偗側偄傛偆偵拲堄偑昁梫偱偡丅
嘇梞暈僽儔僔偺栚偵拲堄偟偰丆恑峴曽岦偵偼妸傞偑丆偦偺媡曽岦偵偼巭傑傞傛偆偵偟傑偡丅
仜梀傃曽
姡揹抮傪揹抮儃僢僋僗偵僙僢僩偟傑偡丅敿屌掕掞峈傪夞偟偰丆曕偔僞僀儈儞僌傪挷愡偟傑偡丅
仜奐敪偵偁偨偭偰
帺憱幃傪嶌偭偰傒偨偔偰丆嵟傕晛媦偟偰偄傞僞僀儅乕IC555傪梡偄傞偙偲傪峫偊傑偟偨丅弌椡傪斀揮偝偣丆戝偒側揹棳傪僶僀僆儊僞儖偵棳偡昁梫偑偁偭偨偨傔丆FET偺億僕僥傿僽僞僀僾傪巊偄傑偟偨丅傑偨丆廳偄姡揹抮傪攚晧偆偨傔丆摦偐偡偺偵嬯楯偟傑偟偨偑丆嵟傕娙扨側捈慄忬偺僸僢僷儕宆偱幚尰偡傞偙偲偑偱偒傑偟偨丅
僶僀僆儊僞儖偺庢傝偮偗曽
u-tube摦夋傪尒傞