乗用メカナム台車
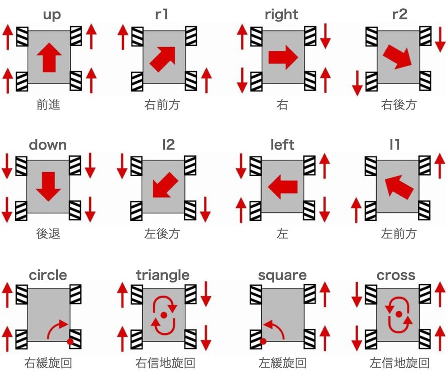
| ○こんな実験です 前後左右、斜め、回転ができる楽しい乗用台車です。 ○こんなことが学べます 動作の原理図を右に示します。 4個のタイヤの回転方向を変えることで、様々な移動が可能になります。 動作のためのアルゴリズムを考えることで、論理性が養われる教材になります。 運転している動画を見る 車輪の回転の動画を見る |
 |
  |
| ○準備しよう メカナムホイール4個、モーターシールド、Arduino MEGA、スイッチ類、12V蓄電池、車軸セット、台車用板、ネジ類、配線材、LED、PLA、3Dプリンタ、アルミ板、旋盤、ボール盤、テスター ○遊び方 電源スイッチを入れ、台車に乗り、コントローラーを操作します。 前後左右斜めの8方向に、左右回転が2方向制御できます。 ○開発にあたって メカナムホイールは真横にも動けるため、縦列駐車に有利であり、工場での精密な配送等に利用されています。おもちゃを作って遊んでましたが、人が乗れる台車が欲しくなりました。しかし、人が乗れるものは高価であり、自作するしかないと思って製作しました。 車軸は、鳥取工業高校の戸國教諭に加工していただきました。 |
 |
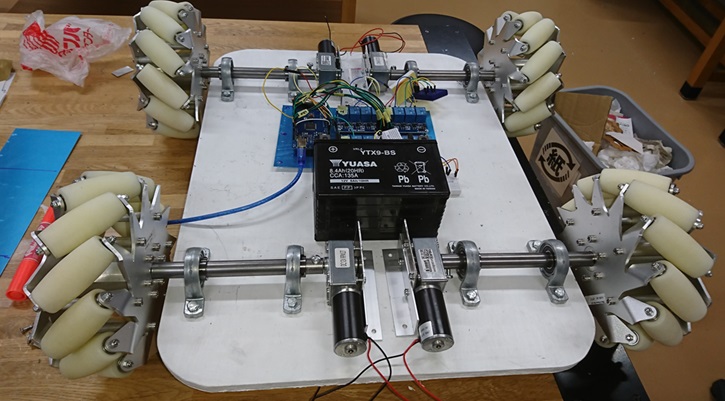
 メカナムホイールと車軸、モーター |
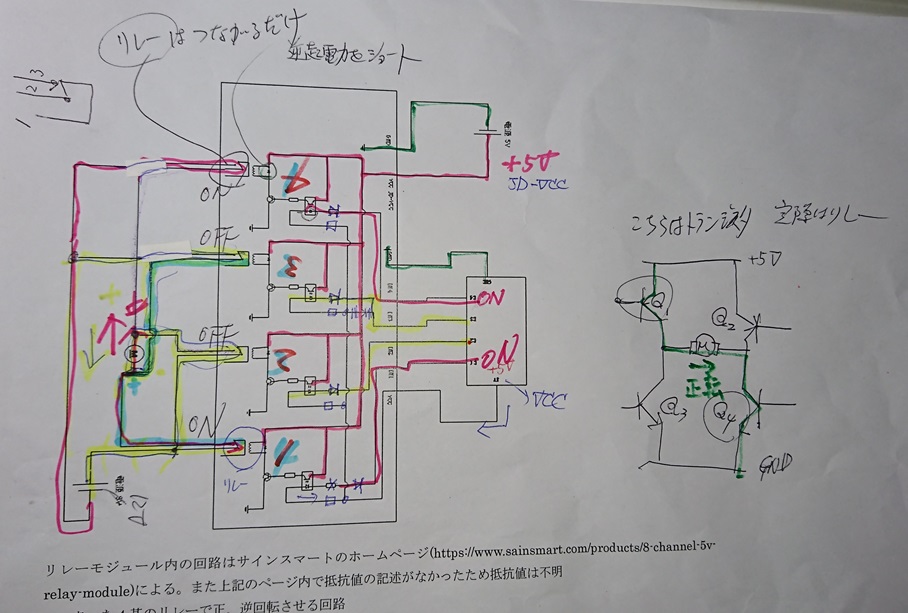 最初はリレーを使って4個のタイヤを制御しようとしたが、リレーのコイルによる大きな逆起電力で不採用 |
  |
|
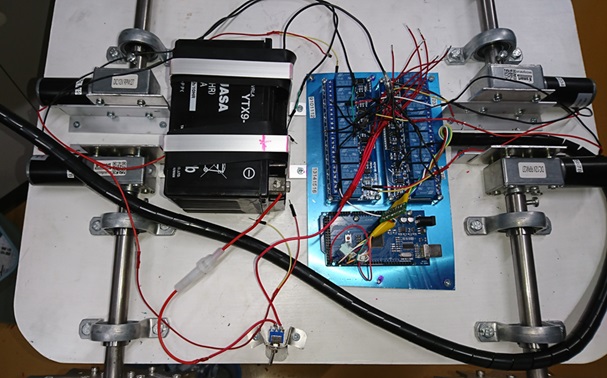 不採用になったリレーを用いた制御 |
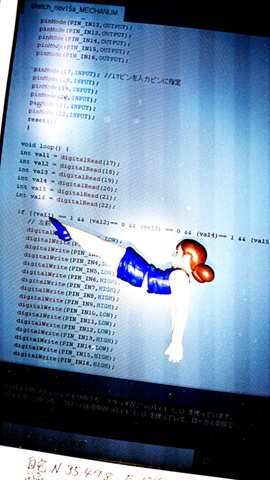 Arduinoのプログラムの一部 |
|
 不採用になったリレー基盤を用いた配線 |
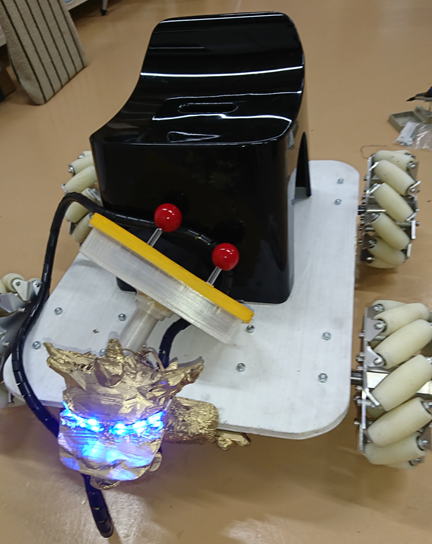
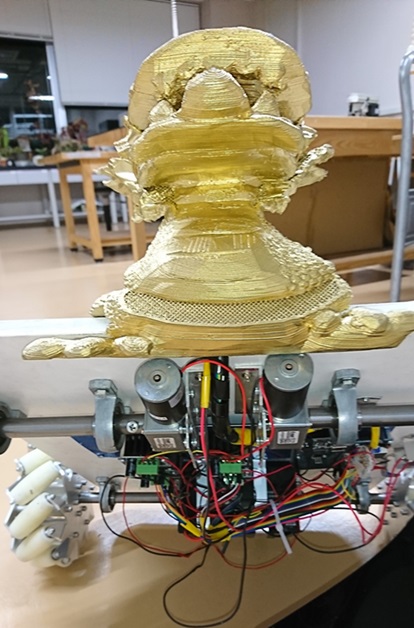
 鳥取なので麒麟獅子を3Dプリンタで作製して台車の前部に飾った |
|
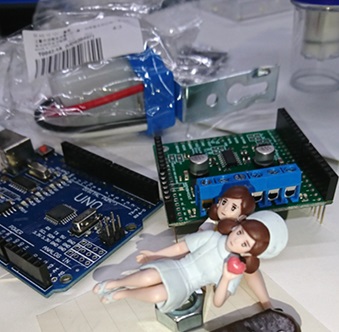
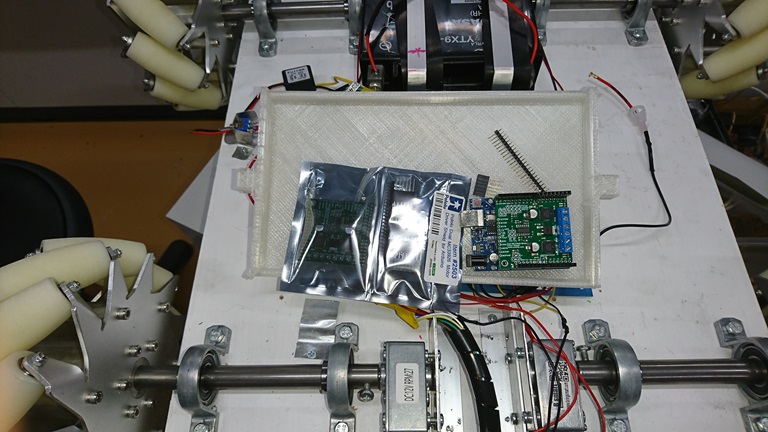 リレーをモーターシールドに変更 |
 運転コントローラー。8方向+2回転 |
|
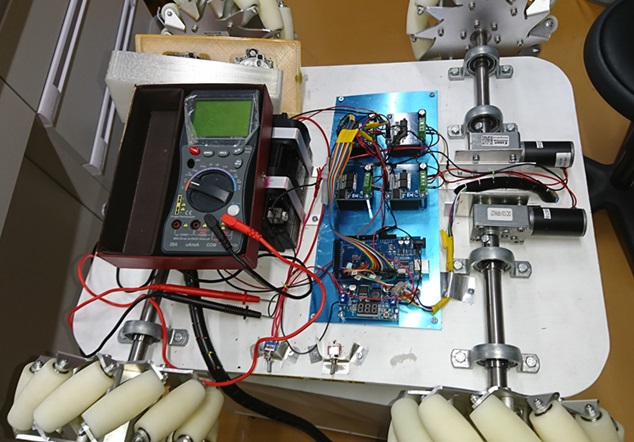 採用した4個のモーターシールド。これだと逆起電力が生じない。ArduinoもMEGAを採用 |
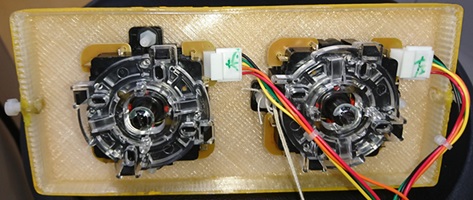 コントローラーの裏側  コントローラーをMEGAに接続 |
|
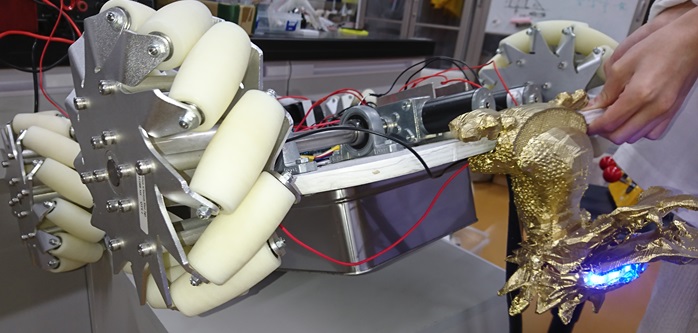  麒麟獅子の目は前照灯として青く光る |
 |
|