形状記憶合金「バイオメタル」の筋肉を持ち,洋服ブラシの靴をはいた,X字型のロボットを作って歩かせます。
○こんなことが学べます
形状記憶合金は、電流を流すと発熱して縮み,電流を切ると伸びます。筋肉のようなはたらきをするので,人工筋肉「バイオメタル」と呼ばれます。
ロボットの移動には,脚の裏の洋服ブラシの毛並の向きによる摩擦の差を使っています。
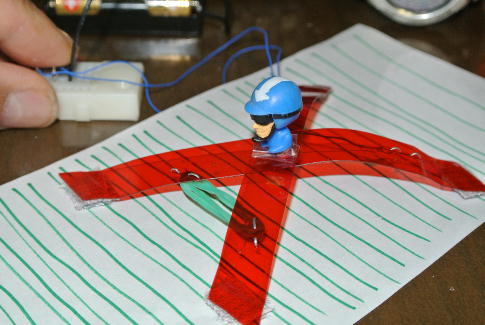 完成したX-ROBOに乾電池1.5Vとスイッチを接続し,動かしている様子。
完成したX-ROBOに乾電池1.5Vとスイッチを接続し,動かしている様子。摩擦の関係で,西洋紙の上で動かすとよい。
人工筋肉(形状記憶合金 直径0.1mm×5cm)、プラ板、アルミテープ、洋服ブラシ、導線、輪ゴム、型紙、メガネ端子、配線材、ハトメ、ハトメパンチ、ステプラー、圧着ペンチ
○入手先
人工筋肉バイオメタル,メガネ端子:トキコーポレーションhttp://www.toki.co.jp/biometal/

実験材料
1台あたりの材料一式
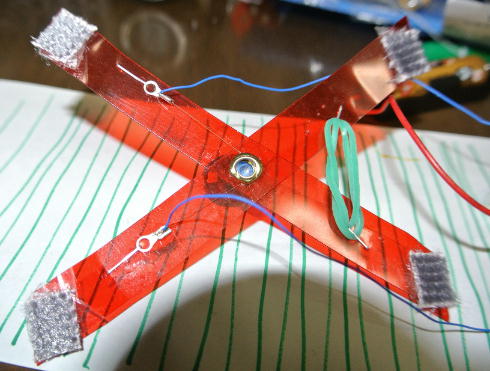
(1) 細く切ったプラスチックの下敷きを2枚重ね、中央にパンチで穴を開けます。
(2) 穴をはとめで固定し、回転できるようにし、本体とします(図1①)。
(3) 本体の2枚のプラスチック板の裏面に、形状記憶合金線のメガネ端子部分を、はとめにひっかけてステプラーで止めます(図1②)。
(4) プラスチック板の他端に輪ゴムの両端をステプラーで止めます(図1③)。
(5) プラスチック板の両端を少し谷折りし、その裏に向きに注意して、切った洋服ブラシを両面テープで止めます(図1④、図2)。
(6) 本体中央に両面テープでパイロットを固定します(図1⑤)。

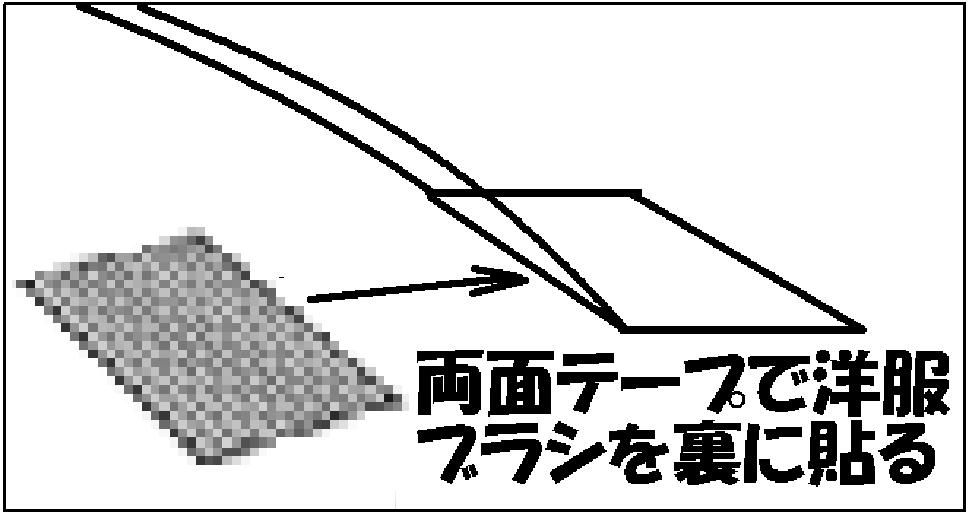
図1 図2
形状記憶合金線に接続した配線コードの端を乾電池に接続し、紙の上に置いて電流を断続し、歩行動作を確認します。
※足の開閉が小さいときは、形状記憶合金を強くはりなおしてください。
○気をつけよう
スイッチを入れると形状記憶合金が発熱します。2秒以上押し続けてはいけません。また、形状記憶合金は熱くなるので、さわらないように注意しましょう。
○開発にあたって
科学の祭典全国大会2013に向けて,尺取虫ロボットを発展させ,4本足で歩行できる簡単な構造のロボットを開発しました。
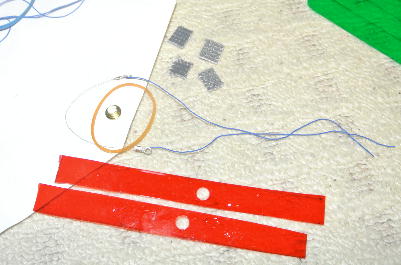
裏から見た様子