サイエンスバトル(スカパーで放映されるサイエンスチャンネル。放映後Webで見ることができる)の収録用に作成した,振動モーターで左右のプラスチックの脚やブラシを動かして,進む向きを制御できるロボットです。振動のShakeとRobotを組み合わせて,ShakeRobo(シェイクロボ)と名付けました。
○こんなことが分かります
蛇のうろこなど,前に進むのに都合よくできている構造は,生物によく見られます。ShakeRoboで遊びながら,運動の対称性が損なわれることから,前に進むしくみを体感することができます。
○原理
振動を発生させるには,回転軸に取り付けたおもりの重心が回転軸から離れている偏心モータを使います。また,前進するには,前進方向の摩擦が少なく,後退方向の摩擦が大きいようにように,脚を水平面に対して傾けます。超音波を出す圧電素子の振動を,ノコギリ状の歯の断面を持つ脚に伝えると,滑らかな床の上をすべるように進みます。
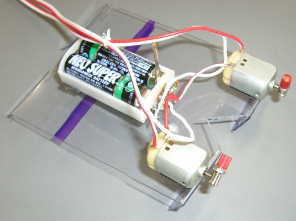
透明アクリル板で作ったShakeRobo
このロボットの動画を見る
圧電素子で動く装置の動画を見る

超音波を出す圧電素子で振動して動く装置

裏面の脚の断面は,ノコギリの歯の形になっている
プラ板,金属ブラシ等(脚をブラシにするとき),モータ2個,ミニ・ターミナル2個,プッシュスイッチ2個,電池ボックス(単3電池2個用),配線材(直径1mm程度の細いヨリ線),強力両面テープ,はさみ,ニッパ,ハンダごて,ハンダ,はさみ
○作ってみよう
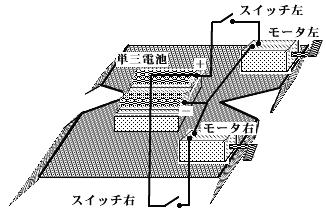
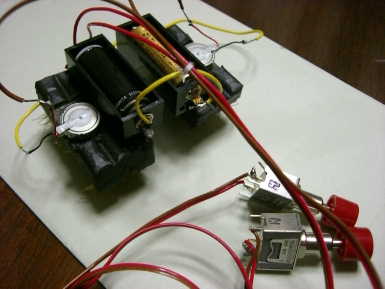
① 右図のようにモータ2個とスイッチ2個,電池ボックスを配線します。モータには,ミニ・ターミナルを偏心おもりとして軸に固定します。
② プラスチックタイプのものは,プラスチック板を右図のように切り,脚はハンダごてで折れ線を加熱し,柔らかくしてから前後同じ角度で曲げます。
③ ブラシタイプのものは,ブラシをラジオペンチで一方向に折り曲げ,2個のブラシをプラスチック板に両面テープで固定します。
④ ①の回路を②または③の本体に両面テープでしっかり固定します。

マッサージ器の中の偏心モータ。おもりの重心は,モータの回転軸から離れたところにある
 ノコギリを用いたShakeRobo
ノコギリを用いたShakeRobo
サイエンスバトルでのプラスチックタイプ生徒作品
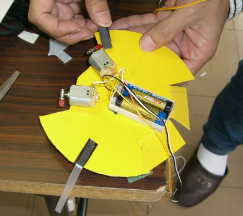
サイエンスバトルでのプラスチックタイプ生徒作品(カブトガニ型)
このロボットの戦いを見る
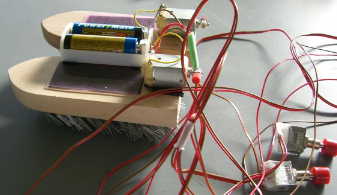
金属ブラシを2個用いたタイプ
このロボットの動画を見る

ロボット相撲で優勝した青チームの,金属ブラシタイプの「もちあげ君」
左右のモータのスイッチを同時に押すと前進,右モータのスイッチだけ押すと,左へ回転しながら進みます。障害物をよけながら速くゴールすることを競うスラローム大会や,土俵の外へ押し出す相撲大会などで遊ぶことができます。
○気をつけよう
固い金属ブラシでは,指を刺したりしないよう気をつけよう。
 賀露公民館のロビーに展示された生徒作品
賀露公民館のロビーに展示された生徒作品
金属ブラシタイプの生徒作品(カブトムシ型)
サイエンスバトルの収録(2006.12.23,24賀露地区公民館,小学生10名参加。5人の青・赤チームでオールプラスチックのものと金属ブラシのものとで対戦)の連絡があり,振動モーターを使った車で相撲ができないかと相談を受けました。そこで,以前左右に回転できるようにモーターを付けて制御したことがあるので,子ども達に作りやすく,扱いやすいものを考案し,ShakeRobo(シェイクロボ)と名付けました。
携帯用円盤形振動モーターを使ったタイプ
ボタン電池にすると,小さなロボットを作ることができます。