
ONSEN君が見学にやって来ました
2年前の卒業生の課題研究「歩け塗壁」を引継、二足歩行ができ、スペースをあまり取らない横歩き型の大型のおもちゃを作りました。
二足歩行をするおもちゃのしくみを調べ,エネルギーの関係を学びます。
○こんなことが学べます
歩くという運動は,振動の一種であり,摩擦によって振動が減衰するため,斜面を降りるように,位置エネルギーを与える必要があることが分かります。
○こんな仕組みです
二足歩行をするためには,交互に左右の足を前に出さないといけません。ぬりかべの足の裏は左右側面が丸く削られているため,まず身体を斜面と平行にして、斜面上方にゆらします。上側の足の裏を斜面に着けて、下側の脚が持ち上がります。この脚が斜面に戻るとき、重力の作用で身体ごと下に投げ出され、こんどは下側の固定脚を斜面につけて上側の可動脚が持ち上がります。この脚は重力により下に降り出され、固定脚に近づいて着地し、次に上方の可動脚の足の裏を着けて、下方の脚が持ち上がるため、下への移動が生まれます。
運動を持続させるエネルギーは,斜面上方に持ち上げたために塗壁が持った,重力による位置エネルギーです。
 斜面を歩く塗壁2の動画(MPEG4)斜面を歩く塗壁2の骨格の動画(MPEG4)斜面を歩くバネ式脚の動画(AVI)
斜面を歩く塗壁2の動画(MPEG4)斜面を歩く塗壁2の骨格の動画(MPEG4)斜面を歩くバネ式脚の動画(AVI)角材、板材、ベニヤ板、丸棒、布、発泡ポリスチレン、ボルト・ナット(大、小)、ワッシャー、木工ボンド、発泡ポリスチレン用ボンド、両面テープ、発泡スチロールカッター、電動ドリル、グラインダ、ノコギリ
○作ってみよう
(1) 足の裏の形状
振り子運動をなめらかにするため、足の裏を両足くっつけた状態で、正面から見て足の裏が円形になるようにグラインダで削りました。
(2) 本体のバランスの調整
斜面での振り子運動では、振動が大きくなって倒れないように、バランスを調整する必要があります。このため、ナットとワッシャーをおもりとして用い、それらの位置と数を試行錯誤しながら調節を行いました。また、塗り壁のジャケットを発泡ポリスチレンで作りましたが、ジャケット自体の慣性モーメントが塗壁の振動に大きく影響したため、それをかぶせることにより、バランスが大きく変化しました。そこで、新たにおもりを加え、調整する必要が生じました。
(3) スリップの解決
足の裏と斜面との摩擦が木の面同士だと小さいため、スリップしました。これを防ぐため、斜面と脚の裏の両方に布を貼り付けました。これによってずれることなく歩行が可能になりました。
(4) その他の工夫
胴体部分にかぶせる塗壁ジャケットの内部には、脚の運動をさまたげないように発泡ポリスチレンでジャケット固定用の棚を貼り付けました。
斜面の板は丸棒に摩擦を利用して固定し、角度を任意に調整できるようにして、安定した条件が探れるようにしました。
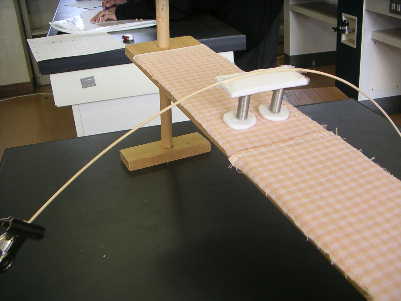
 本体と脚の構造
本体と脚の構造
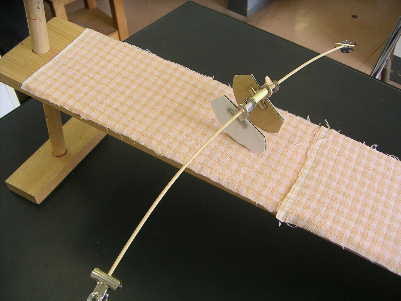
おもりの調整
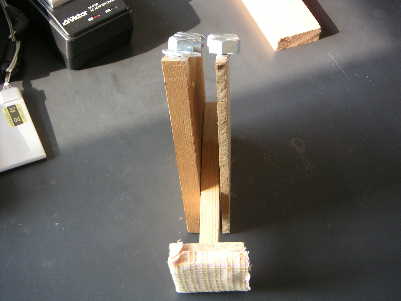 本体側面図と固定脚
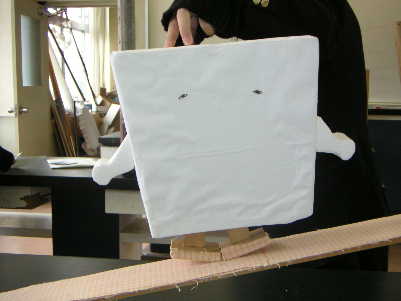
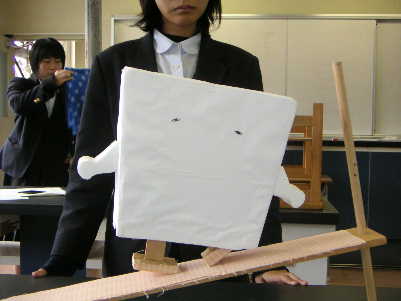
本体側面図と固定脚 布を張った斜面と塗壁ジャケット
布を張った斜面と塗壁ジャケット(1) 小さなものを相似形を保ったまま大きくしても、摩擦や空気抵抗、慣性モーメントなどの大きさに関係した物理現象が働くため、改めてバランスの調整が必要になる。
(2) 慣性モーメントについては、発泡ポリスチレンのように軽い物質で胴体部分のジャケットを作ったが、その大きさの効果により、振動周期が長くなった。これは、腕の長さの長い振り子が生じたことと同等である。したがって、ゆっくりした動きを得ようとすれば大きく、すばやい動きを得ようとすれば小さく作ればよいことがわかった。
(3) ここで製作した塗壁では、脚と胴体はお互いに固有の振動数を持っている。そのため、両者の振動数が一致するように脚の長さや胴体の大きさを調整すると、安定して位置エネルギーが振動の運動エネルギーに変換される。ただし、摩擦や振動の大きさに起因する転倒や振動の減衰が生じるため、おもりの微妙な調整が絶えずつきまとうことは避けられない。
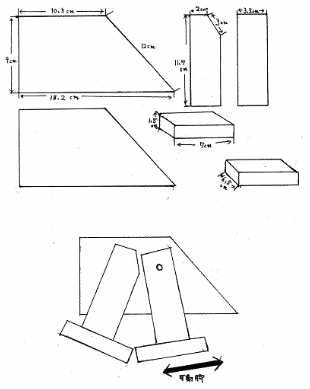
○ 組み立て図
寸法(単位はcm)を付した胴体と脚部の設計図を次ページに示した。二本の脚のうち一方は胴体に固定し、他方はなめらかに可動できるようにしています。
動画を参考にしてください。h壁の固定脚側を斜面下側にし、この脚を持ち上げるように傾けて斜面の上に置くと、振動しながら歩行を開始します。
最初に取り組んだバネ式の脚
目玉クリップ式の脚

民芸品の横歩きおもちゃ
2002年のの課題研究を引き継ぎ、前研究での振り子式歩行の欠点である「長い腕によるスペースの確保の課題」を、自分たちでもっと改良できないか、大きい物はできないかと思いました。
最初はバネの脚を持ち、腕を振り子にした形状でスタートしました。振り子の部分に竹ひごを使い、おもりには目玉クリップを使いました。その結果、小さなステップで少しずつではあるが、歩くものができました。
次に、それに塗壁のジャケットを着せてみることにしました。ジャケットには最初厚紙を使ってみましたが、前や後ろに倒れてしまい、うまく歩けなかったので、今度は和紙を使って軽量化を試みることにしました。しかし、結果は厚紙と同じで、実験は失敗に終わりました。
次に私たちは民芸品店にある、昔ながらの木製の、斜面をコトコト下るおもちゃにヒントを得ることにしました。このタイプだと長い振り子の腕が不要なため、省スペース化が可能です。
こうして横歩き方を製作することになりました。最初、単純に大きくしてみましたが、いろんな問題が発生してなかなか歩くことができなかったため、1つずつ解決することにしました。
最近二足歩行ロボットが、大学や企業、民間の研究機関で注目され、盛んに研究されるようになって来ています。本研究のように、シンプルな構造で二足歩行を追求したことは、ロボットの歩行にも応用できる基礎研究につながるものと思われます。数ヶ月間にわたり様々なタイプの二足歩行を試し、また横歩きタイプに決めてからも、微妙なバランス調整や形状、大きさの工夫に多くの時間を費やしました。しかし、そのかいあって、転倒せずに安定した歩行が可能な条件を見つけだすことができました。
進学のため高校生活では工作には縁遠い環境になりがちですが、この課題研究を通じて、科学的な見方や研究の手法を学ぶとともに、ものづくりの原点とその大切さを見たように感じました。
○参考文献
(1)「つくる科学の本」 足利裕人 (株)シータスク
(2)「塗壁計画」―歩行するおもちゃの作製― 小川春樹、大西正浩 鳥取県立青谷高等学校研究紀要 創刊号 p.137